
珠海博成自動(dòng)化科技有限公司
電話:0756-2262158
傳真:0756-2262158
聯(lián)系人 :李先生
手機(jī):15812791025
詳細(xì)地址:廣東省珠海市金灣區(qū)紅旗鎮(zhèn)南翔路2號(hào)A棟

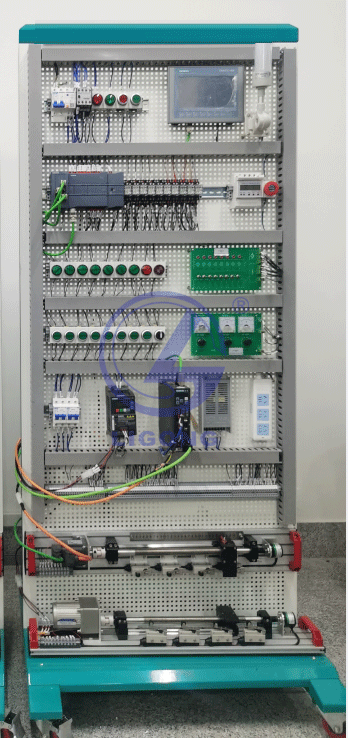
PLC直線運(yùn)動(dòng)控制組合實(shí)訓(xùn)臺(tái)BCLG-JNT01A型
一、技術(shù)指標(biāo)
1、采用鋁合金框架與網(wǎng)孔板組合成立式實(shí)訓(xùn)展板結(jié)構(gòu)形式,有腳輪。
2、實(shí)訓(xùn)臺(tái)尺寸為1800 mm(高)×800 mm(寬)×465 mm(底座深)。
3、實(shí)訓(xùn)臺(tái)上安裝西門(mén)子1200電控系統(tǒng)和二種機(jī)械模型。
4、電氣控制實(shí)訓(xùn)板上主要硬件有:空氣開(kāi)關(guān)、變頻器、伺服驅(qū)動(dòng)器、電源保護(hù)及操作按鈕和指示燈、PLC、觸摸屏、24VDC 50W開(kāi)關(guān)電源、模擬量輸出驅(qū)動(dòng)調(diào)壓模塊等控制器件。
5、控制系統(tǒng)主要器件為西門(mén)子品牌,采用前面板配線。
6、電氣控制系統(tǒng)可對(duì)二種實(shí)物模型分別進(jìn)行控制。配有接線原理圖。
7、異步電機(jī)直線運(yùn)動(dòng)模型可實(shí)現(xiàn)交流電機(jī)變頻調(diào)速控制、位置控制、轉(zhuǎn)速控制。
8、伺服電機(jī)直線運(yùn)動(dòng)模型可實(shí)現(xiàn)交流伺服電機(jī)調(diào)速控制、位置控制、轉(zhuǎn)速控制。
9、網(wǎng)孔板上的器件可靈活安裝、拆卸、組合、擴(kuò)展,是學(xué)生進(jìn)行機(jī)電一體化實(shí)訓(xùn)的基礎(chǔ)平臺(tái)。
10、電氣控制實(shí)訓(xùn)板上,安裝西門(mén)子1214C PLC主機(jī)及模擬量信號(hào)板,具有PROFINET接口,具有16路數(shù)字量輸入,8路晶體管輸出, 1路模擬量輸出;另配置ET200S,數(shù)字量 8入8出。
11、觸摸屏選用西門(mén)子KTP700,7寸,具有PROFINET接口。
12、變頻器選用西門(mén)子品牌V20系列0.37KW變頻器。
13、交流伺服驅(qū)動(dòng)器及伺服電機(jī)選用雷賽品牌L7系列。
14、物聯(lián)網(wǎng)遠(yuǎn)程模塊,支持對(duì)PLC遠(yuǎn)程上下載程序、遠(yuǎn)程監(jiān)控,手機(jī)APP監(jiān)控等。
15、每套設(shè)備通過(guò)交換機(jī)以太網(wǎng)通訊。
16、多套設(shè)備之間通過(guò)以太網(wǎng)通訊。
二、工藝設(shè)計(jì)
1、實(shí)訓(xùn)臺(tái)為開(kāi)放式工業(yè)電氣柜結(jié)構(gòu)形式,工藝貼近工程實(shí)際,拆裝電氣元件和機(jī)械模型靈活方便。
2、裝配臺(tái)為立式展板式,有腳輪,移動(dòng)方便。
3、實(shí)訓(xùn)臺(tái)使用單相220V電源,功率小于500W。
4、實(shí)訓(xùn)臺(tái)另外需配置電腦桌和計(jì)算機(jī),供編程使用,用戶(hù)自備。
5、實(shí)訓(xùn)臺(tái)上的電源控制是按照工業(yè)電氣柜中的電源控制功能制作,具有方便的可操作性、可指示性,并安裝來(lái)電指示燈和運(yùn)行指示燈,作為用電狀態(tài)指示,提供直流24V開(kāi)關(guān)電源,為PLC回路及觸摸屏提供工作電源。
6、實(shí)訓(xùn)臺(tái)上PLC、繼電器、空氣開(kāi)關(guān)等元件可以在已安裝的U型導(dǎo)軌上直接固定或拆卸,觸摸屏可通過(guò)相配套的支架安裝。按鈕指示燈等可通過(guò)支撐板進(jìn)行固定安裝。
7、實(shí)訓(xùn)臺(tái)電路布線采用前面板式,有行線槽,電線采用國(guó)標(biāo)0.5~1.0平方BVR軟線。
8、機(jī)械模型,可以方便在實(shí)訓(xùn)臺(tái)上拆裝。
三、器件配置
序號(hào) | 名稱(chēng) | 品牌型號(hào) | 數(shù)量 |
1
| 實(shí)訓(xùn)臺(tái)底座及展板 | 用于安裝器件及模型 | 1 |
PLC | 西門(mén)子1214C主機(jī),自帶Profinet接口 ,16路數(shù)字量輸入,8路數(shù)字量輸出;配置1路模擬量輸出;配置ET200S, 8入8出 | 1 | |
觸摸屏 | 西門(mén)子KTP700,7寸彩色PN口 | 1 | |
交換機(jī) | 西門(mén)子5口 | 1 | |
變頻器 | V20系列 0.37KW | 1 | |
伺服驅(qū)動(dòng)器 | AC220V 200W | 1 | |
物聯(lián)網(wǎng)模塊 | 4G | 1 | |
電氣控制元件 | 空開(kāi)、接觸器、指示燈、插接端子、按鈕支架、報(bào)警燈、電纜電線等 | 1 | |
2 | 異步電機(jī)直線運(yùn)動(dòng)模型 | LGBJ-M01A | 1 |
3 | 伺服電機(jī)直線運(yùn)動(dòng)模型 | LGSF-M01A | 1 |
4 | 開(kāi)關(guān)量基礎(chǔ)板 | 按鈕、開(kāi)關(guān)、指示燈 | 1 |
5 | 模擬量基礎(chǔ)板 | 電位器、電壓表 | 1 |
6 | 工業(yè)控制成套仿真軟件和資源包 | 包含1套博圖V17 PLC編程軟件,1套PLC控制編程仿真軟件,1套工業(yè)自動(dòng)化控制實(shí)訓(xùn)系統(tǒng),1套電氣控制技能實(shí)訓(xùn)仿真軟件 | 1 |
7 | 云智能實(shí)驗(yàn)室安全管理系統(tǒng) | 本平臺(tái)將無(wú)線傳輸、信息處理等物聯(lián)網(wǎng)技術(shù)應(yīng)用用于自動(dòng)化遠(yuǎn)程控制。設(shè)備端運(yùn)行狀態(tài)、數(shù)據(jù)參數(shù)等上傳至云平臺(tái)。物聯(lián)網(wǎng)系統(tǒng)的傳感層、傳輸層和應(yīng)用層關(guān)聯(lián)掌握數(shù)據(jù)與分析數(shù)據(jù),整個(gè)實(shí)訓(xùn)室配置一套管理系統(tǒng)。
★投標(biāo)文件里提供(1)-(9)項(xiàng)內(nèi)容相符的系統(tǒng)截圖或照片。 ★為避免可能產(chǎn)生的產(chǎn)權(quán)糾紛需提供相關(guān)軟件證書(shū)掃描件,原件備查。 | 1 |
8 | 電腦桌 | 型材:600*600*780mm | 1 |
9 | 臺(tái)式電腦(自配) | (i7-12700 16G 256G固態(tài)+1T)+23英寸 | 1 |
五、異步電機(jī)直線運(yùn)動(dòng)模型技術(shù)指標(biāo)
1、異步電機(jī)直線運(yùn)動(dòng)模型外觀
2、異步電機(jī)直線運(yùn)動(dòng)模型技術(shù)說(shuō)明:
(1)異步電機(jī)直線運(yùn)動(dòng)模型由三相交流減速異步電機(jī)、聯(lián)軸器、軸承、絲杠、絲母(運(yùn)動(dòng)滑塊)、支架、旋轉(zhuǎn)編碼器等組成,固定在金屬底板上。
(2)三相交流減速異步電動(dòng)機(jī),15W,三相交流220V,速比1:3,可由變頻器進(jìn)行速度調(diào)節(jié)。
(3)滑塊運(yùn)動(dòng)有效行程300mm。終端有機(jī)械保護(hù)。
(4)位置檢測(cè)器件具有行程開(kāi)關(guān)4個(gè)、旋轉(zhuǎn)編碼器1個(gè)(1000P/R)。
(5)通過(guò)位置檢測(cè)元件和電機(jī)調(diào)速,可對(duì)運(yùn)動(dòng)滑塊進(jìn)行位置和速度控制,能模仿工廠中許多設(shè)備的工作情況,實(shí)驗(yàn)內(nèi)容極其豐富。
(6)異步電機(jī)直線運(yùn)動(dòng)模型外形尺寸:700 mm(長(zhǎng))×180 mm(寬)×150 mm(高)。3、異步電機(jī)直線運(yùn)動(dòng)模型實(shí)驗(yàn)題目:
(1)位置檢測(cè)實(shí)驗(yàn)
實(shí)驗(yàn)一:行程開(kāi)關(guān)位置檢測(cè)控制實(shí)驗(yàn)
實(shí)驗(yàn)二:旋轉(zhuǎn)編碼器位置速度檢測(cè)控制實(shí)驗(yàn)
(2)綜合應(yīng)用實(shí)驗(yàn)
實(shí)驗(yàn)一:龍門(mén)刨工作臺(tái)自動(dòng)往返速度控制實(shí)驗(yàn)
實(shí)驗(yàn)二:多工步機(jī)床動(dòng)力頭進(jìn)給速度控制實(shí)驗(yàn)
實(shí)驗(yàn)三:汽車(chē)頂蓋龍門(mén)式單面雙點(diǎn)焊接設(shè)備位置速度控制實(shí)驗(yàn)
實(shí)驗(yàn)四:鋁合金自動(dòng)鋸下料設(shè)備位置控制實(shí)驗(yàn)
實(shí)驗(yàn)五:立體倉(cāng)庫(kù)堆垛機(jī)行走方向相對(duì)認(rèn)址技術(shù)控制實(shí)驗(yàn)
4、異步電機(jī)直線運(yùn)動(dòng)模型變頻器實(shí)驗(yàn)題目:
實(shí)驗(yàn)一 面板操作實(shí)驗(yàn)
實(shí)驗(yàn)二 端子操作實(shí)驗(yàn)
實(shí)驗(yàn)三 啟停速度選擇實(shí)驗(yàn)
實(shí)驗(yàn)四 多段速度選擇實(shí)驗(yàn)
實(shí)驗(yàn)五 自由停止與直流制動(dòng)實(shí)驗(yàn)
實(shí)驗(yàn)六 電位器輸入與模擬監(jiān)控實(shí)驗(yàn)
六、伺服直線運(yùn)動(dòng)模型技術(shù)指標(biāo)
1、伺服直線運(yùn)動(dòng)模型外觀
2、伺服電機(jī)直線運(yùn)動(dòng)模型技術(shù)說(shuō)明:
(1)伺服電機(jī)直線運(yùn)動(dòng)模型由交流伺服電機(jī)、聯(lián)軸器、軸承、絲杠、絲母(運(yùn)動(dòng)滑塊)、支架、旋轉(zhuǎn)編碼器等組成,固定在金屬底板上。
(2)伺服電機(jī),額定功率:200W,額定轉(zhuǎn)矩:0.64N/m,單相交流220V,額定轉(zhuǎn)速:3000r/min,額定電流:1.6A.。
(3)滑塊運(yùn)動(dòng)有效行程300mm。終端有機(jī)械保護(hù)。
(4)位置檢測(cè)器件具有旋轉(zhuǎn)編碼器1個(gè)(1000P/R)。
(5)通過(guò)位置檢測(cè)元件和電機(jī)調(diào)速,可對(duì)運(yùn)動(dòng)滑塊進(jìn)行位置和速度控制,能模仿工廠中許多設(shè)備的工作情況,實(shí)驗(yàn)內(nèi)容極其豐富。
(6)伺服電機(jī)直線運(yùn)動(dòng)模型外形尺寸:700 mm(長(zhǎng))×180 mm(寬)×150 mm(高)。
七、軟件及課件資源
1、博圖V17 PLC編程軟件、MCGS
2、PLC控制編程仿真軟件
1)軟件特點(diǎn):
(1)軟件以PLC為原型,實(shí)現(xiàn)基本指令、應(yīng)用指令以及順序控制指令的仿真模擬。
(2)軟件通過(guò)實(shí)訓(xùn)要求,了解實(shí)訓(xùn)目的和控制要求。
(3)實(shí)訓(xùn)器件采用三維仿真實(shí)物組件,讓學(xué)生了解控制實(shí)驗(yàn)中所需的元件。
(4)通過(guò)器件庫(kù),學(xué)生可進(jìn)行器件布局,對(duì)各控制回路進(jìn)行模擬接線。
(5)通過(guò)I/O分配布置,將鼠標(biāo)移到I/O分配地址資源相應(yīng)部分能查看到相對(duì)應(yīng)的實(shí)物。
(6)通過(guò)符號(hào)庫(kù),選擇正確的符號(hào)放置有T型圖正確位置,實(shí)現(xiàn)接線仿真。
(7)在原理圖中進(jìn)行模擬仿真連接電路,按步驟連接正確后才能進(jìn)行下一條的接線操作。
(8)接線完成實(shí)現(xiàn)通電運(yùn)行,通過(guò)鼠標(biāo)進(jìn)行上電運(yùn)行,軟件會(huì)以動(dòng)畫(huà)形式進(jìn)行動(dòng)作演示。
2)軟件仿真項(xiàng)目
(1)雙面銑床控制
(2)工業(yè)洗衣機(jī)控制
(3)皮帶運(yùn)輸線控制
(4)電鍍生產(chǎn)線控制
(5)運(yùn)料小車(chē)控制
(6)音樂(lè)噴泉控制
(7)簡(jiǎn)易機(jī)械手控制
(8)大小球傳送裝置控制
(9)循環(huán)彩燈控制
(10)停車(chē)場(chǎng)車(chē)位控制
(11)小推車(chē)控制
(12)三層電梯控制
(13)電動(dòng)機(jī)啟停控制
(14)電動(dòng)機(jī)正反轉(zhuǎn)控制
(15)電動(dòng)機(jī)循環(huán)正反轉(zhuǎn)控制
(16)可逆運(yùn)行反接制動(dòng)控制
(17)三速電機(jī)控制
(18)星角降壓?jiǎn)?dòng)控制
(19)數(shù)碼管點(diǎn)亮控制
(20)交通燈控制
(21)恒壓供水系統(tǒng)控制
★投標(biāo)時(shí)提供提供不少于十張的軟件截圖,并提供軟件正版佐證復(fù)印件原件備查,如PLC控制編程仿真軟件著作權(quán)證書(shū)。
3、工業(yè)自動(dòng)化控制實(shí)訓(xùn)系統(tǒng)
通過(guò)本系統(tǒng)軟件了解組成智能制造生產(chǎn)線的電氣、氣動(dòng)、PLC等元件的工作原理并對(duì)機(jī)電系統(tǒng)的設(shè)計(jì)、分析進(jìn)行虛擬仿真。通過(guò)選擇元件利用符合繪制二維回路圖或利用三維模型在系統(tǒng)內(nèi)實(shí)現(xiàn)智能制造的動(dòng)作而進(jìn)行虛擬仿真。本系統(tǒng)不僅實(shí)現(xiàn)工廠的三維仿真使虛擬現(xiàn)實(shí)仿真更加逼真,而且把通過(guò)仿真驗(yàn)證的控制邏輯單元可用作監(jiān)視及控制模塊,使能夠?qū)崿F(xiàn)并行工程及軟件、硬件的并行設(shè)計(jì)。
仿真基本模塊包括:
(1)反饋控制和順序控制系統(tǒng)
(2)指示燈的與門(mén)(AND)控制
(3)物品傳送裝置
(4)單向氣缸控制
(5)雙缸聯(lián)動(dòng)控制
(6)帶式輸送裝置系統(tǒng)
(7)滾筒式輸送裝置系統(tǒng)
(8)指示燈順序閃爍回路
(9)自動(dòng)控制標(biāo)記打印操作控制
(10)電梯控制
(11)氣壓控制移動(dòng)裝置
(12)工業(yè)機(jī)器人控制
(13)帶式傳送帶實(shí)習(xí)裝置
(14)氣壓傳動(dòng)流水線實(shí)驗(yàn)裝置
★投標(biāo)時(shí)提供提供不少于十張的軟件截圖,并提供軟件正版佐證復(fù)印件原件備查,如工業(yè)自動(dòng)化控制實(shí)訓(xùn)系統(tǒng)軟件著作權(quán)證書(shū)。
5、電氣控制技能實(shí)訓(xùn)仿真軟件
應(yīng)適用于電氣控制及電工培訓(xùn),仿真軟件應(yīng)收集有電拖專(zhuān)業(yè)里最基礎(chǔ)、最重要的18種電路,電動(dòng)機(jī)反接制動(dòng)控制電路、三相電動(dòng)機(jī)機(jī)械制動(dòng)控制電路、時(shí)間繼電器自動(dòng)控制電動(dòng)機(jī)Y-Δ降壓起動(dòng)電路、接觸器自動(dòng)控制電動(dòng)機(jī)Y-Δ降壓起動(dòng)電路、自耦補(bǔ)償控制的電動(dòng)機(jī)降壓起動(dòng)控制電路、生產(chǎn)機(jī)械行程控制電路、雙重聯(lián)鎖電動(dòng)機(jī)可逆控制電路、有過(guò)載保護(hù)的電動(dòng)機(jī)單向運(yùn)轉(zhuǎn)電氣控制電路、直流電動(dòng)機(jī)的正反轉(zhuǎn)控制電路、直流電動(dòng)機(jī)的制動(dòng)控制電路、直流電動(dòng)機(jī)調(diào)速控制電路、鉆床電氣控制電路、平面磨床控制電路、車(chē)床電氣控制電路、繞線式電動(dòng)機(jī)運(yùn)轉(zhuǎn)控制電路、電動(dòng)葫蘆控制電路、接觸器控制的雙速電動(dòng)機(jī)調(diào)速電路、能耗制控制電路。每種線路分為元件結(jié)構(gòu)、原理分析、實(shí)際接線、課堂練習(xí)四大模塊。軟件還包括安全用電常識(shí),常用電工工具,常用導(dǎo)線連接,手工焊接工藝等;電工儀表:包括萬(wàn)能表,電能表,鉗型電流表,直流電橋,配電板等;電機(jī)與變壓器:包括三相異步電動(dòng)機(jī),單機(jī)異步電動(dòng)機(jī),伺服電機(jī),步進(jìn)電機(jī),直流電機(jī)等;低壓電器;包括交流接觸器:繼電器,低壓斷路器,熔斷器,起動(dòng)器,主令電器等;照明電路安裝:包括熒光燈,兩地控制燈。軟件形式上有多媒體演示動(dòng)畫(huà)課件和自學(xué)型交互課件,視頻部分在大型的一流企業(yè)實(shí)景拍攝,所使用的設(shè)備與工藝流程,皆為生產(chǎn)車(chē)間現(xiàn)在正在使用的生產(chǎn)技術(shù)。情景模擬軟件支持多媒體播放,讓你切身實(shí)際的感受儀器的使用方法、注意事項(xiàng),能夠身臨其境地感受到操作儀器的逼真效果。
★投標(biāo)時(shí)并提供軟件正版佐證復(fù)印件原件備查,如電氣控制技能實(shí)訓(xùn)仿真軟件著作權(quán)證書(shū)。
6、電氣教學(xué)課件資源
為方便教學(xué),提供課件資源必須不得少于15個(gè)課時(shí)的教學(xué)課件,內(nèi)容生產(chǎn)豐富,采用動(dòng)畫(huà)演示,帶實(shí)物圖片、電路圖等。投標(biāo)時(shí)現(xiàn)場(chǎng)演示內(nèi)容。
內(nèi)容包括:
(1)三相交流電路:三相電壓、負(fù)載星形聯(lián)結(jié)的三相電路、負(fù)載三角形聯(lián)結(jié)的三相電路、三相功率;
(2)磁路與變壓器:磁路的基本概念與基本定律、交流鐵心線圈電路、電磁鐵、變壓器;
(3)交流電動(dòng)機(jī):三相交流異步電動(dòng)機(jī)的構(gòu)造、三相交流異步電動(dòng)機(jī)的轉(zhuǎn)動(dòng)原理、三相交流異步電動(dòng)機(jī)的電磁轉(zhuǎn)矩與機(jī)械特性、三相交流異步電動(dòng)機(jī)的啟動(dòng)、反轉(zhuǎn)、調(diào)速和制動(dòng)、三相交流異步電動(dòng)機(jī)的銘牌數(shù)據(jù)、三相交流異步電動(dòng)機(jī)的選擇;
(4)繼電接觸器控制:常用控制電器、鼠籠式電動(dòng)機(jī)的啟動(dòng)控制、鼠籠式電動(dòng)機(jī)的正反轉(zhuǎn)和行程控制、多臺(tái)鼠籠式電動(dòng)機(jī)的順序控制、鼠籠式電動(dòng)機(jī)的制動(dòng)控制;
(5)工廠供電系統(tǒng)基礎(chǔ)知識(shí):工廠供電系統(tǒng)基礎(chǔ)知識(shí)、電力系統(tǒng)的電壓、衡量電能質(zhì)量的主要指標(biāo)、安全用電、
(6)電路的基本概念與基本定律:電路的基本物理量、電壓源與電流源、電阻元件與歐姆定律、電感元件與電容元件、電源有載工作、開(kāi)路與短路、基爾霍夫定律、電路中電位的概念及計(jì)算、電阻電路的分析方法;
(7)一階電路的暫態(tài)分析:電阻串并聯(lián)聯(lián)接的等效變換、電源兩種模型的等效變換、支路電流法、結(jié)點(diǎn)電壓法、疊加原理、等效電源定理;
(8)一階電路的暫態(tài)分析:一階電路和換路定律、一階RC電路的響應(yīng)、一階電路的三要素法分析法、一階RL電路的響應(yīng);
(9)正弦交流電路的分析:正弦量的三要素、正弦量的相量表示、單一電路元件的交流電路分析、RLC串聯(lián)的交流電路分析、復(fù)雜正弦交流電路分析、功率因數(shù)的提高、諧振電路;
(10)半導(dǎo)體器件:半導(dǎo)體基礎(chǔ)知識(shí)、二極管、特殊二極管、雙極型晶體管;
(11)基本放大電路:共射極放大電路的直流通路、共射極放大電路的交流通路、靜態(tài)工作點(diǎn)穩(wěn)定、放大電路的頻率特性、射極輸出器、差分放大器、互補(bǔ)對(duì)稱(chēng)功率放大電路、場(chǎng)效應(yīng)管及其放大電路;
(12)集成運(yùn)算放大器應(yīng)用:集成電路與運(yùn)算放大器介紹、集成運(yùn)放的應(yīng)用、集成運(yùn)算放大器在信號(hào)處理方面的應(yīng)用、集成電壓比較器;
(13)直流穩(wěn)壓電源:整流電路、濾波電路、集成穩(wěn)壓器;
(14)基本門(mén)電路和組合邏輯電路:數(shù)字電路概述、邏輯門(mén)電路、TTL門(mén)電路、邏輯代數(shù)、組合邏輯電路的分析和設(shè)計(jì)、常用組合邏輯電路、組合邏輯電路應(yīng)用實(shí)例;
(15)觸發(fā)器與時(shí)序邏輯電路:觸發(fā)器、時(shí)序邏輯電路、施密特觸發(fā)器、單穩(wěn)態(tài)觸發(fā)器與555定時(shí)器電路、555定時(shí)器及其應(yīng)用。
▲投標(biāo)時(shí)提供1-15項(xiàng)內(nèi)容不少于10張的截圖。
7、PLC教學(xué)課件資源
(1)PLC的認(rèn)知:PLC簡(jiǎn)介、PLC工作原理及運(yùn)行模式、PLC特點(diǎn)、PLC擴(kuò)展功能、PLC應(yīng)用技術(shù)人才培養(yǎng);
(2)軟件的使用:軟件開(kāi)發(fā)平臺(tái)、集成軟件簡(jiǎn)介、入門(mén)實(shí)例;
(3)實(shí)訓(xùn)項(xiàng)目示范:八路搶答器編程、三相異步電機(jī)的星三角降壓?jiǎn)?dòng)、運(yùn)料小車(chē)往返控制、十字路口交通燈的控制、電動(dòng)機(jī)組的啟停控制、HMI控制液體混合、變頻器的電機(jī)控制。
(4)小型自動(dòng)化生產(chǎn)線的設(shè)計(jì):該系統(tǒng)具有產(chǎn)品的搬運(yùn)、檢測(cè)和傳輸分揀功能,整個(gè)系統(tǒng)由送料單元、機(jī)械手搬運(yùn)單元、步進(jìn)電機(jī)多點(diǎn)定位輸送單元和傳送帶輸送分揀單元等組成。具體的項(xiàng)目設(shè)計(jì)要求如下:
1)本設(shè)計(jì)的要求使用通過(guò)觸摸屏與控制臺(tái)按鈕操作,控制生產(chǎn)線的自動(dòng)運(yùn)行。生產(chǎn)線通電以后,系統(tǒng)自行檢測(cè)初始狀態(tài)是否滿足運(yùn)行條件,如不滿足則自行復(fù)位或手動(dòng)調(diào)整,若滿足則觸摸屏顯示準(zhǔn)備就緒;
2)在準(zhǔn)備就緒的情況下,按下啟動(dòng)按鈕,生產(chǎn)線開(kāi)始按順序運(yùn)行,供料單元開(kāi)始工作,電機(jī)驅(qū)動(dòng)轉(zhuǎn)盤(pán)將工件送到物料臺(tái)上;電機(jī)運(yùn)行10秒后,若物料臺(tái)光電開(kāi)關(guān)沒(méi)有檢測(cè)到物料,說(shuō)明已沒(méi)有物料,開(kāi)始報(bào)警;若檢測(cè)到物料,則一號(hào)搬運(yùn)機(jī)械手開(kāi)始動(dòng)作;
3)物料臺(tái)有料,一號(hào)機(jī)械手臂伸出并下降夾取工件,夾取到工件后機(jī)械手上升縮回并旋轉(zhuǎn)到右側(cè)限位;然后機(jī)械手伸出下降將工件放到步進(jìn)電機(jī)輸送單元的供料臺(tái)上,一號(hào)搬運(yùn)機(jī)械手恢復(fù)到初始狀態(tài),等待下一次運(yùn)行;
4)當(dāng)步進(jìn)電機(jī)輸送單元傳感器檢測(cè)到供料臺(tái)工件后,步進(jìn)電機(jī)前往高度檢測(cè)單元進(jìn)行檢測(cè);到達(dá)后通過(guò)超聲波傳感器進(jìn)行高度檢測(cè),檢測(cè)完畢后;步進(jìn)電機(jī)運(yùn)行到二號(hào)搬運(yùn)機(jī)械手位置;
5)到達(dá)二號(hào)搬運(yùn)機(jī)械手位置后;二號(hào)搬運(yùn)機(jī)械手伸出、爪夾取工件,機(jī)架臺(tái)上升,旋轉(zhuǎn)到右限位,伸出手臂,機(jī)架臺(tái)下降,手爪放松,將工件放到傳送帶上,同時(shí)二號(hào)搬運(yùn)機(jī)械手復(fù)位;
6)當(dāng)傳送帶單元傳感器檢測(cè)到工件時(shí),傳送帶開(kāi)始工作,根據(jù)工件的顏色、材料進(jìn)行分揀;分揀結(jié)束后,供料臺(tái)回到供料位置,等待下一次運(yùn)行。
★投標(biāo)時(shí)提供以上(1)-(4)項(xiàng)內(nèi)容不少于十張的軟件截圖。